Cheat Sheet (Smooth Manifolds)
by Hidenori
- Notes
- Definitions
- Push forwards ($F_*$)
- Pull backs ($F^*$)
- Vector fields
- Covector fields $df$
- Exterior differentiation
- Set of all smooth vector fields ($\mathfrak{X}(M)$)
- Tangent Space ($T_pM$)
- Tangent Bundle ($TM$)
- Cotangent space ($T_p^*M$)
- Cotangent bundle (\(T^*M\))
- Local framing
- Local framing of a tangent bundle
- Local framing of a cotangent bundle
- 0-form ($\mathscr{A}^0(U)$)
- Local section, 1-form ($\mathscr{A}^1(U)$).
- $k$-forms ($\bigwedge^k(T^*_p\mathbb{R}^n), \mathscr{A}^k$)
- Wedge product ($\wedge$)
- Pullback of a $k$-form
- Diffeomorphisms
- Change of coordinates with framings
Notes
Vectors and derivations
- In this class, vectors and derivations seem to be synonyms.
Fields
A *something* field on *set* = a function that assigns *something* to each point of *set*.
- Examples
- Vector field on $M$
- A function that assigns a vector to each point of $M$.
- Vector field on $M$
Star
For any vector space $V$, $V^*$ denotes $L(V, \mathbb{R})$, the set of all linear maps from $V$ to $\mathbb{R}$.
Functions
There seem to be two types of functions in this class:
- Assignment function
- They assign a certain mathematical object to each point.
- Signed length meter
- They take 1 or more values and return a real number.
- They can be seen as a generalization of the determinant function. The determinant function gets $n$ column vectors and returns the signed volume of the parallelepiped. For instance, we have a covector, which takes a vector (=derivation) and returns a number. This can be seen as finding the length of the vector.
Definitions
Push forwards ($F_*$)
Let $F: U \rightarrow V$ be a smooth map where $U \subset \mathbb{R}^n, V \subset \mathbb{R}^m$.
- $F_*$ is called a push forward of $F$.
- There are two different definitions of push forwards.
- The other (simpler) definition is:
- Given $F: M \rightarrow N$, \(F_*: T_pM \rightarrow T_{F(p)}N\) is defined such that \((F_*X)(f) = X(f \circ F)\) for any $X \in T_pM$ and $f \in \mathscr{C}^{\infty}(N)$.
- $F_*$ takes a derivation $X$ in $M$ and turn that into another derivation in $N$.
- There are two different definitions of push forwards.
- $F_*: TU \rightarrow TV$.
- Definition
- Let $(v, p) \in TU$. Let $\gamma: (-\epsilon, \epsilon) \rightarrow U$ be a curve such that $\gamma’(0) = v$. Then $F_*(v) = (F \circ \gamma)’(0)$.
- Theorem
- For each $j \in \{ 1, \cdots, n \}$, $\displaystyle F_*\begin{pmatrix}\frac{\partial}{\partial x^j}\end{pmatrix} = \sum_{s=1}^{m} \frac{\partial F^s}{\partial x^j} \frac{\partial}{\partial y^s}$.
- Notes
-
Let $Y$ be a smooth vector field on $U$. Let $p \in U$ be given. Then $Y_p \in T_pU \subset TU$. Thus \(F_*(Y_p) \in TV\).
This implies that, for each $p \in U$, we get a derivation \(F_*(Y_p)\) at $F(p)$. In other words, for each $F(p) \in V$, we have a derivation \(F_*(Y_p)\). Does this sound like a vector field? It does! However, the map \(F(p) \mapsto F_*(Y_p)\) is not necessarily a vector field on $V$. For instance, if $F(U) \subsetneq V$, then we won’t have a vector assigned to each point.
-
Pull backs ($F^*$)
Let $F: M \rightarrow N, p \in M$. Then the pullback \(F^*: T^*_{F(p)}M \rightarrow T^*_p N\) associated with $F$ is defined by
\[\begin{align*} \forall \zeta \in T^*_{F(p)}(N), X \in T_pM, (F^* \zeta)(X) = \zeta(F_*X). \end{align*}\]Let $F: \mathbb{R}^n \rightarrow \mathbb{R}^m$. Then
\[\begin{align*} F^*(dy^s) = \frac{\partial f^s}{\partial x^j} dx^j. \end{align*}\]Vector fields
- A vector field $Y$ on $M$ assigns a vector to each point in $M$.
- Formally, a vector field is a function $Y: M \rightarrow TM$ such that, for all $p \in M$, $Y(p) = (p, X)$ for some $X \in T_pM$.
- $Y(p)$ is often denoted by $Y_p$. See P.60.
- Since $TM$ is a disjoint union, its elements is a pair $(p, X)$. However, it seems that we often think of $Y_p$ as a derivation instead of a pair of a point and a derivation.
- The textbook says “A vector field on $M$ is a section of $TM$”, which I believe means the same thing.
Covector fields $df$
Let $f$ be a smooth map on $M$. ($f \in \mathscr{C}^{\infty}(M)$.)
Then $df$ denotes a covector field.
This is defined such that $\forall p \in M, \forall X_p \in T_pM, df_p(X_p) = X_pf$. Or for any $X \in \mathfrak{X}(M)$, $df(X) = X(f)$.
This sorta makes sense because
- $df$ is a covector field.
- $df_p$ is a covector, so it takes a vector.
- $X_p$ is a vector, so it takes a smooth map.
- Thus $X_pf$ is a real number.
- This means $df_p$ takes a vector and returns a real number, which is exactly what a covector should do.
- $df = \sum_{i} \frac{\partial f}{\partial x^i} \vert_i dx^i$.
Exterior differentiation
$d: \mathscr{A}^k(U) \rightarrow \mathscr{A}^{k + 1}(U)$ is defined by $d\eta = d(\eta_I dx^I) := d(\eta_I) \wedge dx^I$.
- $d\eta = \frac{\partial\eta_I}{\partial x^j} dx^j \wedge dx^I$.
- Let $V \subset \mathbb{R}^m, U \subset \mathbb{R}^n$. Let $\phi: V \rightarrow U$. Let $\eta \in \mathscr{A}^k(U)$. \(d(\phi^* \eta) = \phi^*(d\eta)\).
- $d(\omega \wedge \eta) = (d\omega) \wedge \eta + (-1)^k \omega \wedge d\eta$.
Set of all smooth vector fields ($\mathfrak{X}(M)$)
$\mathfrak{X}(M)$ denotes the set of all smooth vector fields on $M$. There doesn’t seem to be a name for $\mathfrak{X}(M)$.
- $\mathfrak{X}(M)$ is NOT a vector field. Each element in $\mathfrak{X}(M)$ is a vector field.
- $\mathfrak{X}(M)$ is a vector space over $\mathbb{R}$.
- Moreover, $\mathfrak{X}(M)$ is a module over $\mathscr{C}^{\infty}(M)$.
- $\forall Y \in \mathfrak{X}(M), \forall f \in \mathscr{C}^{\infty}(M), \forall p \in M, (fY)(p) = f(p)Y_p$.
- Reference
- Textbook P.60
- P.62 discusses notations
Tangent Space ($T_pM$)
$T_pM$ denotes the set of all derivations at $p$.
- $\{ \partial_1, \cdots, \partial_n \}$ is a basis of $T_p\mathbb{R}^n$. This implies that every derivation in $\mathbb{R}^n$ can be expressed as a linear combination of partial derivatives.
Tangent Bundle ($TM$)
- $TM = \coprod_{p \in M} T_pM$ is called the tangent bundle of $M$.
- See P.57.
- Let $\pi: TM \rightarrow M$ be defined such that $\pi(p, X) = p$ for each $(p, X) \in TM$. We call $\pi$ the projection map.
- An element of $TM$ is denoted by $(p, X), X_p$, or simply $X$ for convenience. See P.57.
- It is the collection of all vectors on $M$.
Cotangent space ($T_p^*M$)
$T_p^{*}M = L(T_pM, \mathbb{R})$ is the cotangent space at $p$.
Each element of $T_p^*M$ is called a (tangent) covector. See P.68.
- Vector
- In this class, vector = derivation = arrow.
- Covector
- A covector assigns a number to a vector. One can think of this as a signed length, just like $\det$ gives a signed volume to a set of column vectors.
Cotangent bundle (\(T^*M\))
\(T^*M = \coprod_{p \in M} T^*_pM\) is the cotangent bundle on $M$. In other words, it is the collection of all covectors on $M$.
Local framing
There are different types of local framings, but they are very similar.
Local framing of a tangent bundle
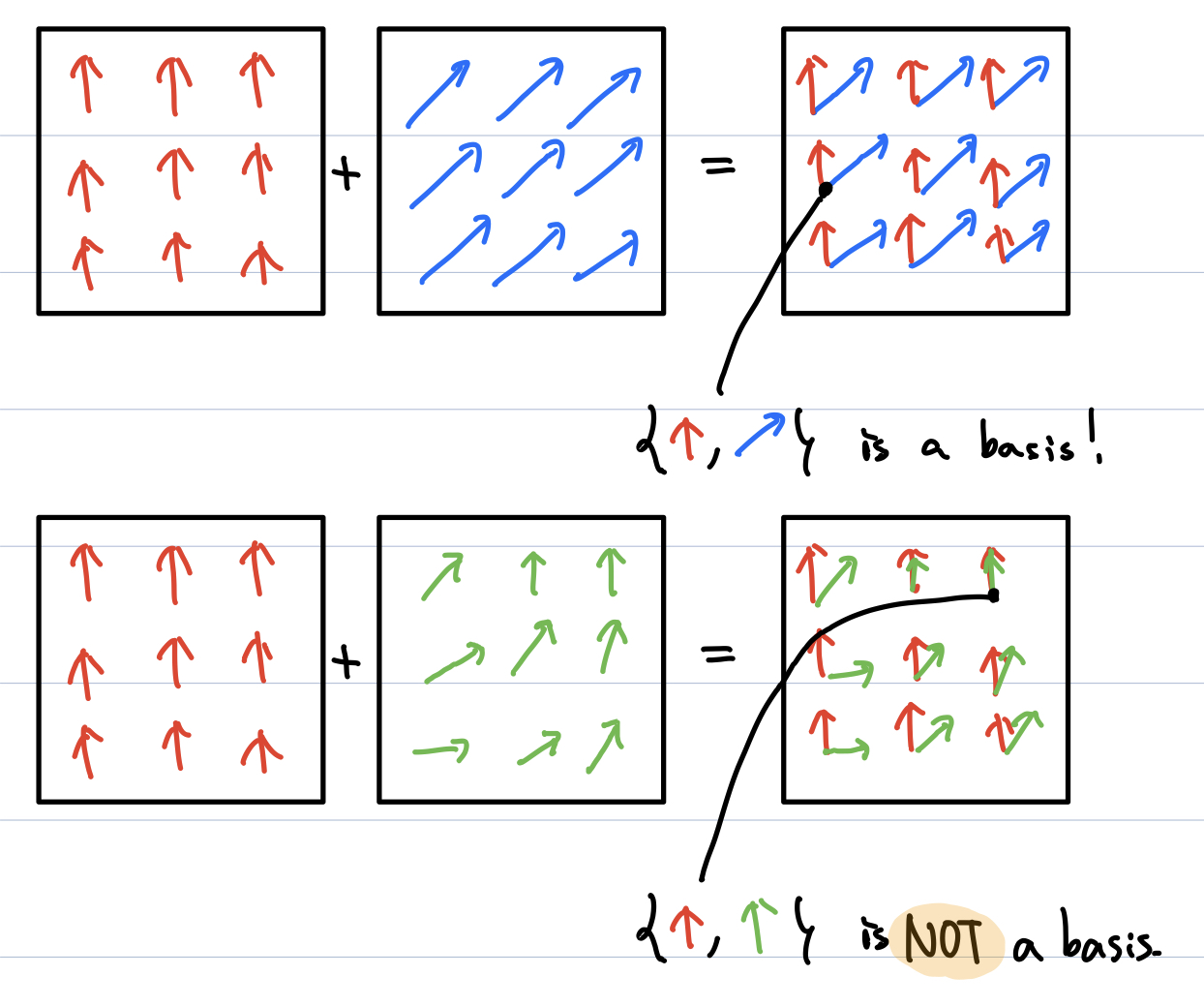
A local framing of $TM$ over $U$ is a collection ${ x_1, \cdots, x_n } \subset \mathfrak{X}(U)$ such that ${ x_{1, p}, \cdots, x_{n, p} }$ is a basis of $T_pM$ for all $p \in U$.
- $x_1, \cdots, x_n$ are vector fields, so $x_{1, p}$ is a derivation at $p \in U$.
- It makes sense that ${ x_{1, p}, \cdots, x_{n, p} }$ might be a basis of $T_pM$ because $T_pM$ is the set of all derivations at $p$, and $x_{i, p}$ is a derivation at $p$.
- ${ \frac{\partial}{\partial x^1}, \cdots, \frac{\partial}{\partial x^n} } \subset \mathfrak{X}(U)$ is a global framing.
Local framing of a cotangent bundle
$\{ \eta^1, \cdots, \eta^n \} \subset \mathscr{A}^1(U)$ is called a local framing of $T^kM$ if $\forall p \in U$, $\{ \eta^1_p, \cdots, \eta^n_p \}$ is a basis of \(T_p^*M\).
This sorta makes sense because:
- For each $i$, $\eta^i$ is a 1-form. In other words, $\eta^i$ assigns a covector to each point.
- $\eta^i_p$ is a covector for each $i$ and $p \in U$, so $\{ \eta^1_p, \cdots, \eta^n_p \}$ is a set of covectors at $p$.
- \(T_p^*M\) is the collection of all covectors at $p$, so $\{ \eta^1_p, \cdots, \eta^n_p \}$ is indeed a subset of \(T_p^*M\).
0-form ($\mathscr{A}^0(U)$)
A 0-form is just a real-valued, smooth function. $\mathscr{A}^k(U) = \mathscr{C}^k(U)$.
Local section, 1-form ($\mathscr{A}^1(U)$).
A 1-form is a smooth covector field.
A map $\eta: U \rightarrow T^*M$ is called a local section of \(T^*M\) over $U$ if $\pi \circ \eta = \Id_U$. In other words, $\eta$ assigns a covector of $p$ to $p$, instead of a covector of a different point.
It is said to be smooth if $\forall X \in \mathfrak{X}(U)$, $p \mapsto \eta_p(X_p)$ is smooth. This statement makes sense because:
- $X$ is a vector field, so $X_p$ is a vector.
- $\eta$ assigns a covector to each point, so $\eta_p$ is a covector.
- Thus $\eta_p(X_p)$ means that we pass a vector to a covector.
A local section assigns a covector to each point. In other words, a local section provides us with a way to assigned a signed length to each derivation.
$\mathscr{A}^1(U)$ is the set of all 1-forms on $U$.
- $\mathscr{A}^1(U)$ itself is not a 1-form. It contains 1-forms.
- $\mathscr{A}^1(U)$ is a vector space over $\mathscr{C}^{\infty}(U)$.
- A 1-form assigns a covector to each point. Thus $\mathscr{A}^1(U)$ is the set of all different ways to assign covectors to points.
$k$-forms ($\bigwedge^k(T^*_p\mathbb{R}^n), \mathscr{A}^k$)
The best explanation I’ve found is:
A differential $k$-form tells us how to measure $k$-dimensional volume according to that coordinate system.
And this is how the textbook defines it.
A smooth section of $\bigwedge^kM$ is called a differential $k$-form, or just a $k$-form; this is just a smooth tensor field whose value at each point is an alternating tensor.
In other words, it is an alternating $k$-tensor field.
Lastly, this is how it is defined in class.
The $k$-th exterior power of the cotangent bundle is the disjoint union
\[\begin{align*} \bigwedge^k T^*\mathbb{R}^n = \coprod_{p \in \mathbb{R}^n} \bigwedge^k(T^*_p\mathbb{R}^n) \end{align*}\]A function \(\eta: \mathbb{R}^n \rightarrow \bigwedge^kT^*\mathbb{R}^n\) is called a $k$-form if
- \(\eta_p \in \bigwedge^kT_p^{*}\mathbb{R}^n\).
- Let $X_i \in \mathfrak{X}(\mathbb{R}^n)$ be given. Then we can define $F: \mathbb{R}^n \rightarrow \mathbb{R}$ such that $F(p) = \eta_p(X_{1, p}, \cdots, X_{k, p})$. Such an $F$ must be smooth for all $X_i$’s.
The set of all $k$-forms is denoted by $\mathscr{A}^k(\mathbb{R}^n)$. The set of all $k$-forms is called $\mathscr{A}^k$ because $\mathscr{A}$ looks like $\bigwedge$ (See P.212).
This sorta makes sense because:
- $\eta_p$ is in $\bigwedge^kT^*\mathbb{R}^n$. $\eta_p$ is an alternating $k$-tensor, so it takes $k$ vectors.
- $X_1, \cdots, X_k$ are vector fields, so $X_{1, p}, \cdots, X_{k, p}$ are vectors.
- Thus $\eta_p(X_{1, p}, \cdots, X_{k, p})$ is a real number.
Note that the textbook uses $\bigwedge^k T\mathbb{R}^n$ to mean $\bigwedge^k T^*\mathbb{R}^n$ in this class.
Wedge product ($\wedge$)
\[\begin{align*} (\mu^1 \wedge \cdots \wedge \mu^k)(v_1, \cdots, v_k) &= \sum_{\sigma \in S^k} \sgn(\sigma)\mu^{\sigma_1}(v_1) \cdots \mu^{\sigma_k}(v_k). \end{align*}\] \[\begin{align*} (\tau \wedge \omega)(v_1, \cdots, v_{k + l}) &= \frac{1}{k!l!} \sum_{\sigma \in S_{k + l}} \sgn(\sigma)(\tau(v_{\sigma_1}, \cdots, v_{\sigma_k})\omega(v_{\sigma_{k + 1}}, \cdots, v_{\sigma_{k + l}})). \end{align*}\]Pullback of a $k$-form
Let $U \subset \mathbb{R}^n, V \subset \mathbb{R}^m, \eta \in \mathscr{A}^k(V), F: U \rightarrow V$. We will define \(F^*\eta\) to be a $k$-form on $V$. In other words, \(F^*\eta \in \mathscr{A}^k(V)\).
Let $p \in U$. Then $(F^*\eta)_p$ is defined such that
\[\begin{align*} \forall v_1, \cdots, v_k \in T_pU, (F^*\eta)_p(v_1, \cdots, v_k) = \eta_{F(p)}(F_* v_1, \cdots, F_* v_k). \end{align*}\]This sorta makes sense because:
- $v_1, \cdots, v_k$ are vectors in $U$.
- The push-forward \(F_*\) maps $T_pU$ into $T_pV$. In other words, \(F_*\) maps a vector in $U$ to a vector in $V$.
- \(F_* v_1, \cdots, F_* v_k\) are vectors in $V$.
- $\eta$ is a $k$-form, which is an assignment of an alternating $k$-tensor to each point of $V$. So, $\eta_{F(p)}$ is an alternating $k$-tensor of $V$.
- Thus $\eta_{F(p)}$ takes $F_* v_1, \cdots, F_* v_k$ as arguments, and returns a real number. So, $(v_1, \cdots, v_k) \mapsto \eta_{F(p)}(F_* v_1, \cdots, F_* v_k)$ is an alternating $k$-tensor.
- This means $F^*\eta \in \mathscr{A}^k(U)$, and \((F^*\eta)_p \in \bigwedge^k(T_pU)\).
- With this definition, $F^*$ maps $\mathscr{A}^k(V)$ into $\mathscr{A}^k(U)$. In other words, $k$-forms pull back to $k$-forms.
- $\displaystyle F^*(dy^s) = \frac{\partial F^s}{\partial x^i} dx^i$.
Diffeomorphisms
A diffeomorphism $U \subset \mathbb{R}^n$ to $V \subset \mathbb{R}^n$ is a smooth map $F = (f^1, \cdots, f^n) : U \rightarrow V$ that has a smooth inverse.
Some formulas
- Chain rule: $\displaystyle \frac{\partial}{\partial x^a} = \frac{\partial f^i}{\partial x^a}\frac{\partial}{\partial y^i}$ where $y_i = f^i(x)$.
- If we let $G = F^{-1}$, then $\displaystyle \frac{\partial}{\partial y^a} = \frac{\partial g^j}{\partial y^a}\frac{\partial}{\partial x^j}$.
Change of coordinates with framings
Let
\[\begin{align*} \Big\{ \frac{\partial}{\partial x^i} \Big\}^{n}_{i=1}, \Big\{ \frac{\partial}{\partial y^i} \Big\}^{n}_{i=1} \end{align*}\]be two framings of $\mathbb{R}^n$, and let \(\{ dx^i \}_{i=1}^n\) and \(\{ dy^i \}_{i=1}^n\) of \(T^*\mathbb{R}^n\). Let \(F: \mathbb{R}^n_x \rightarrow \mathbb{R}^n_y, G: \mathbb{R}^n_y \rightarrow \mathbb{R}^n_x\).
Then
- \(dx^i = \frac{\partial g^i}{\partial y^j} dy^j = dg^i\).
- \(dy^j = \frac{\partial f^j}{\partial x^i} dx^i = df^j\).
Subscribe via RSS